Teaching Robots to Understand Semantic Concepts
July 21, 2017
Posted by Sergey Levine, Faculty Advisor and Pierre Sermanet, Research Scientist, Google Brain Team
Quick links
Machine learning can allow robots to acquire complex skills, such as grasping and opening doors. However, learning these skills requires us to manually program reward functions that the robots then attempt to optimize. In contrast, people can understand the goal of a task just from watching someone else do it, or simply by being told what the goal is. We can do this because we draw on our own prior knowledge about the world: when we see someone cut an apple, we understand that the goal is to produce two slices, regardless of what type of apple it is, or what kind of tool is used to cut it. Similarly, if we are told to pick up the apple, we understand which object we are to grab because we can ground the word “apple” in the environment: we know what it means.
These are semantic concepts: salient events like producing two slices, and object categories denoted by words such as “apple.” Can we teach robots to understand semantic concepts, to get them to follow simple commands specified through categorical labels or user-provided examples? In this post, we discuss some of our recent work on robotic learning that combines experience that is autonomously gathered by the robot, which is plentiful but lacks human-provided labels, with human-labeled data that allows a robot to understand semantics. We will describe how robots can use their experience to understand the salient events in a human-provided demonstration, mimic human movements despite the differences between human robot bodies, and understand semantic categories, like “toy” and “pen”, to pick up objects based on user commands.
Understanding human demonstrations with deep visual features
In the first set of experiments, which appear in our paper Unsupervised Perceptual Rewards for Imitation Learning, our is aim is to enable a robot to understand a task, such as opening a door, from seeing only a small number of unlabeled human demonstrations. By analyzing these demonstrations, the robot must understand what is the semantically salient event that constitutes task success, and then use reinforcement learning to perform it.
 |
| Examples of human demonstrations (left) and the corresponding robotic imitation (right). |
 |
| Example of reward functions learned solely from observation for the door opening tasks. Rewards progressively increase from zero to the maximum reward as a task is completed. |
 |
| Learning progression. |
In Time-Contrastive Networks: Self-Supervised Learning from Multi-View Observation, we propose a novel approach to learn about the world from observation and demonstrate it through self-supervised pose imitation. Our approach relies primarily on co-occurrence in time and space for supervision: by training to distinguish frames from different times of a video, it learns to disentangle and organize reality into useful abstract representations.
In a pose imitation task for example, different dimensions of the representation may encode for different joints of a human or robotic body. Rather than defining by hand a mapping between human and robot joints (which is ambiguous in the first place because of physiological differences), we let the robot learn to imitate in an end-to-end fashion. When our model is simultaneously trained on human and robot observations, it naturally discovers the correspondence between the two, even though no correspondence is provided. We thus obtain a robot that can imitate human poses without having ever been given a correspondence between humans and robots.
 |
| Self-supervised human pose imitation by a robot. |
Grasping with semantic object categories
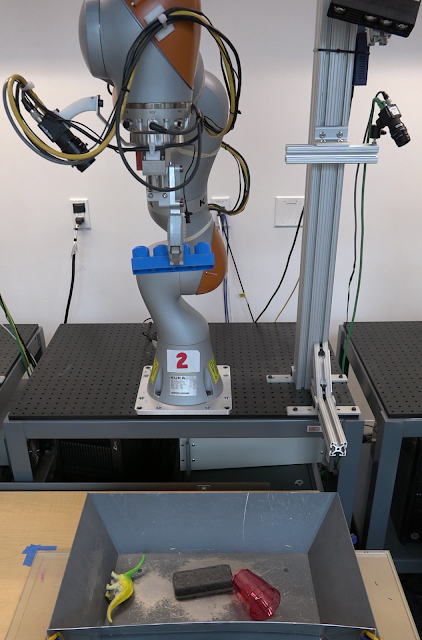
The experiments above illustrate how a person can specify a goal for a robot through an example demonstration, in which case the robots must interpret the semantics of the task -- salient events and relevant features of the pose. What if instead of showing the task, the human simply wants to tell it to what to do? This also requires the robot to understand semantics, in order to identify which objects in the world correspond to the semantic category specified by the user. In End-to-End Learning of Semantic Grasping, we study how a combination of manually labeled and autonomously collected data can be used to perform the task of semantic grasping, where the robot must pick up an object from a cluttered bin that matches a user-specified class label, such as “eraser” or “toy.”
 |
| In our semantic grasping setup, the robotic arm is tasked with picking up an object corresponding to a user-provided semantic category (e.g. Legos). |
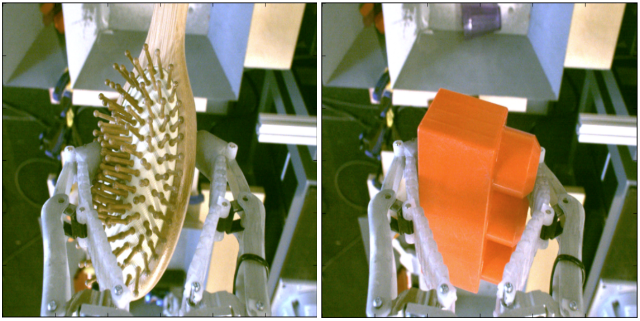
 |
| The robot presents objects to the camera after grasping. These images can be used to label which object category was picked up. |
Using this labeled dataset, we can then train a two-stream model that predicts which object will be grasped, conditioned on the current image and the actions that the robot might take. The two-stream model that we employ is inspired by the dorsal-ventral decomposition observed in the human visual cortex, where the ventral stream reasons about the semantic class of objects, while the dorsal stream reasons about the geometry of the grasp. Crucially, the ventral stream can incorporate auxiliary data consisting of labeled images of objects (not necessarily from the robot), while the dorsal stream can incorporate auxiliary data of grasping that does not have semantic labels, allowing the entire system to be trained more effectively using larger amounts of heterogeneously labeled data. In this way, we can combine a limited amount of human labels with a large amount of autonomously collected robotic data to grasp objects based on desired semantic category, as illustrated in the video below:
Future Work
Our experiments show how limited semantically labeled data can be combined with data that is collected and labeled automatically by the robots, in order to enable robots to understand events, object categories, and user demonstrations. In the future, we might imagine that robotic systems could be trained with a combination of user-annotated data and ever-increasing autonomously collected datasets, improving robotic capability and easing the engineering burden of designing autonomous robots. Furthermore, as robotic systems collect more and more automatically annotated data in the real world, this data can be used to improve not just robotic systems, but also systems for computer vision, speech recognition, and natural language processing that can all benefit from such large auxiliary data sources.
Of course, we are not the first to consider the intersection of robotics and semantics. Extensive prior work in natural language understanding, robotic perception, grasping, and imitation learning has considered how semantics and action can be combined in a robotic system. However, the experiments we discussed above might point the way to future work into combining self-supervised and human-labeled data in the context of autonomous robotic systems.
Acknowledgements
The research described in this post was performed by Pierre Sermanet, Kelvin Xu, Corey Lynch, Jasmine Hsu, Eric Jang, Sudheendra Vijayanarasimhan, Peter Pastor, Julian Ibarz, and Sergey Levine. We also thank Mrinal Kalakrishnan, Ali Yahya, and Yevgen Chebotar for developing the policy learning framework used for the door task, and John-Michael Burke for conducting experiments for semantic grasping.
Unsupervised Perceptual Rewards for Imitation Learning was presented at RSS 2017 by Kelvin Xu, and Time-Contrastive Networks: Self-Supervised Learning from Multi-View Observation will be presented this week at the CVPR Workshop on Deep Learning for Robotic Vision.
-
Labels:
- Machine Intelligence
- Robotics
Quick links
Other posts of interest
-

March 31, 2026
Building better AI benchmarks: How many raters are enough?- Algorithms & Theory ·
- Machine Intelligence
-
March 25, 2026
Vibe Coding XR: Accelerating AI + XR prototyping with XR Blocks and Gemini- Human-Computer Interaction and Visualization ·
- Machine Intelligence
-
March 24, 2026
TurboQuant: Redefining AI efficiency with extreme compression- Algorithms & Theory ·
- Generative AI ·
- Machine Intelligence
×
❮
❯