Seamless Google Street View Panoramas
November 9, 2017
Posted by Mike Krainin, Software Engineer and Ce Liu, Research Scientist, Machine Perception
Quick links
In 2007, we introduced Google Street View, enabling you to explore the world through panoramas of neighborhoods, landmarks, museums and more, right from your browser or mobile device. The creation of these panoramas is a complicated process, involving capturing images from a multi-camera rig called a rosette, and then using image blending techniques to carefully stitch them all together. However, many things can thwart the creation of a "successful" panorama, such as mis-calibration of the rosette camera geometry, timing differences between adjacent cameras, and parallax. And while we attempt to address these issues by using approximate scene geometry to account for parallax and frequent camera re-calibration, visible seams in image overlap regions can still occur.
 |
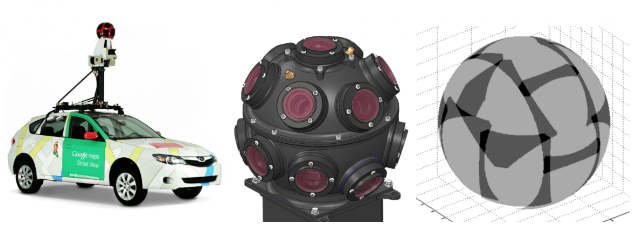
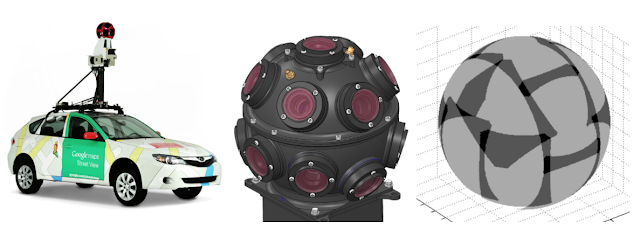
| Left: A Street View car carrying a multi-camera rosette. Center: A close-up of the rosette, which is made up of 15 cameras. Right: A visualization of the spatial coverage of each camera. Overlap between adjacent cameras is shown in darker gray. |
 |
| Left: The Sydney Opera House with stitching seams along its iconic shells. Right: The same Street View panorama after optical flow seam repair. |
Optical Flow
The first step is to find corresponding pixel locations for each pair of images that overlap. Using techniques described in our PhotoScan blog post, we compute optical flow from one image to the other. This provides a smooth and dense correspondence field. We then downsample the correspondences for computational efficiency. We also discard correspondences where there isn’t enough visual structure to be confident in the results of optical flow.
 |
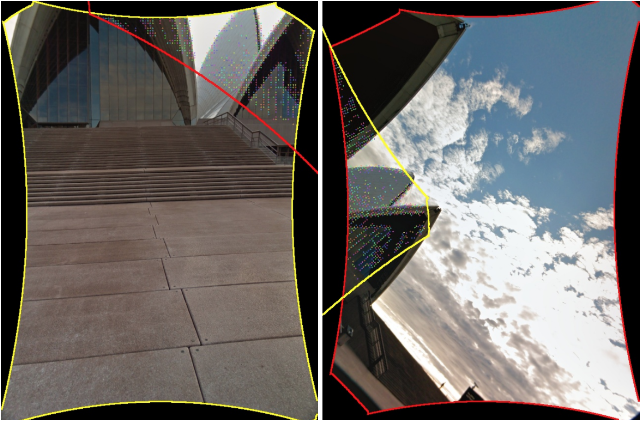
The boundaries of a pair of constituent images from the rosette camera rig that need to be stitched together. |
 |
| An illustration of optical flow within the pair’s overlap region. |
 |
| Extracted correspondences in the pair of images. For each colored dot in the overlap region of the left image, there is an equivalently-colored dot in the overlap region of the right image, indicating how the optical flow algorithm has aligned the point. These pairs of corresponding points are used as input to the global optimization stage. Notice that the overlap covers only a small portion of each image. |
The second step is to warp the rosette’s images to simultaneously align all of the corresponding points from overlap regions (as seen in the figure above). When stitched into a panorama, the set of warped images will then properly align. This is challenging because the overlap regions cover only a small fraction of each image, resulting in an under-constrained problem. To generate visually pleasing results across the whole image, we formulate the warping as a spline-based flow field with spatial regularization. The spline parameters are solved for in a non-linear optimization using Google’s open source Ceres Solver.
 |
| A visualization of the final warping process. Left: A section of the panorama covering 180 degrees horizontally. Notice that the overall effect of warping is intentionally quite subtle. Right: A close-up, highlighting how warping repairs the seams. |
 |
| Left: A close-up of the un-repaired panorama. Middle: Result of kernel-based interpolation. This fixes discontinuities but at the expense of strong wobbling artifacts due to the small image overlap and limited footprint of kernels. Right: Result of our global optimization. |
 |
| Tower Bridge, London |
 |
| Christ the Redeemer, Rio de Janeiro |
 |
| An SUV on the streets of Seattle |
Acknowledgements
Special thanks to Bryan Klingner for helping to integrate this feature with the Street View infrastructure.
Quick links
Other posts of interest
-

March 31, 2026
Building better AI benchmarks: How many raters are enough?- Algorithms & Theory ·
- Machine Intelligence
-

March 31, 2026
Safeguarding cryptocurrency by disclosing quantum vulnerabilities responsibly- Algorithms & Theory ·
- Quantum ·
- Security, Privacy and Abuse Prevention
-
March 24, 2026
TurboQuant: Redefining AI efficiency with extreme compression- Algorithms & Theory ·
- Generative AI ·
- Machine Intelligence
×
❮
❯