Reducing the Need for Labeled Data in Generative Adversarial Networks
March 20, 2019
Posted by Mario Lučić, Research Scientist and Marvin Ritter, Software Engineer, Google AI Zürich
Quick links
Generative adversarial networks (GANs) are a powerful class of deep generative models.The main idea behind GANs is to train two neural networks: the generator, which learns how to synthesise data (such as an image), and the discriminator, which learns how to distinguish real data from the ones synthesised by the generator. This approach has been successfully used for high-fidelity natural image synthesis, improving learned image compression, data augmentation, and more.
 |
| Evolution of the generated samples as training progresses on ImageNet. The generator network is conditioned on the class (e.g., "great gray owl" or "golden retriever"). |
In "High-Fidelity Image Generation With Fewer Labels", we propose a new approach to reduce the amount of labeled data required to train state-of-the-art conditional GANs. When combined with recent advancements on large-scale GANs, we match the state-of-the-art in high-fidelity natural image synthesis using 10x fewer labels. Based on this research, we are also releasing a major update to the Compare GAN library, which contains all the components necessary to train and evaluate modern GANs.
Improvements via Semi-supervision and Self-supervision
In conditional GANs, both the generator and discriminator are typically conditioned on class labels. In this work, we propose to replace the hand-annotated ground truth labels with inferred ones. To infer high-quality labels for a large dataset of mostly unlabeled data, we take a two-step approach: First, we learn a feature representation using only the unlabeled portion of the dataset. To learn the feature representations we make use of self-supervision in the form of a recently introduced approach, in which the unlabeled images are randomly rotated and a deep convolutional neural network is tasked with predicting the rotation angle. The idea is that the models need to be able to recognize the main objects and their shapes in order to be successful on this task.
 |
| An unlabeled image is randomly rotated and the network is tasked with predicting the rotation angle. Successful models need to capture semantically meaningful image features which can then be used for other vision tasks. |
To further improve the model quality and training stability we encourage the discriminator network to learn meaningful feature representations which are not forgotten during training by means of an auxiliary loss we introduced previously. These two advancements, combined with large-scale training lead to state-of-the-art conditional GANs for the task of ImageNet synthesis as measured by the Fréchet Inception Distance.
 |
| Given a latent vector the generator network produces an image. In each row, linear interpolation between the latent codes of the leftmost and the rightmost image results in a semantic interpolation in the image space. |
Cutting-edge research on GANs is heavily dependent on a well-engineered and well-tested codebase, since even replicating prior results and techniques requires a significant effort. In order to foster open science and allow the research community benefit from recent advancements, we are releasing a major update of the Compare GAN library. The library includes loss functions, regularization and normalization schemes, neural architectures, and quantitative metrics commonly used in modern GANs, and now supports:
- Training on GPUs and TPUs.
- Lightweight configuration via Gin (examples).
- A plethora of data sets via the TensorFlow datasets library.
Given the growing gap between labeled and unlabeled data sources, it is becoming increasingly important to be able to learn from only partially labeled data. We have shown that a simple yet powerful combination of self-supervision and semi-supervision can help to close this gap for GANs. We believe that self-supervision is a powerful idea that should be investigated for other generative modeling tasks.
Acknowledgments
Work conducted in collaboration with colleagues on the Google Brain team in Zürich, ETH Zürich and UCLA. We would like to thank our paper co-authors Michael Tschannen, Xiaohua Zhai, Olivier Bachem and Sylvain Gelly for their input and feedback. We would like to thank Alexander Kolesnikov, Lucas Beyer and Avital Oliver for helpful discussion on self-supervised learning and semi-supervised learning. We would like to thank Karol Kurach and Marcin Michalski for their major contributions to the Compare GAN library. We would also like to thank Andy Brock, Jeff Donahue and Karen Simonyan for their insights into training GANs on TPUs. The work described in this post also builds upon our work on “Self-Supervised Generative Adversarial Networks” with Ting Chen and Neil Houlsby.
Quick links
Other posts of interest
-

March 31, 2026
Building better AI benchmarks: How many raters are enough?- Algorithms & Theory ·
- Machine Intelligence
-
March 25, 2026
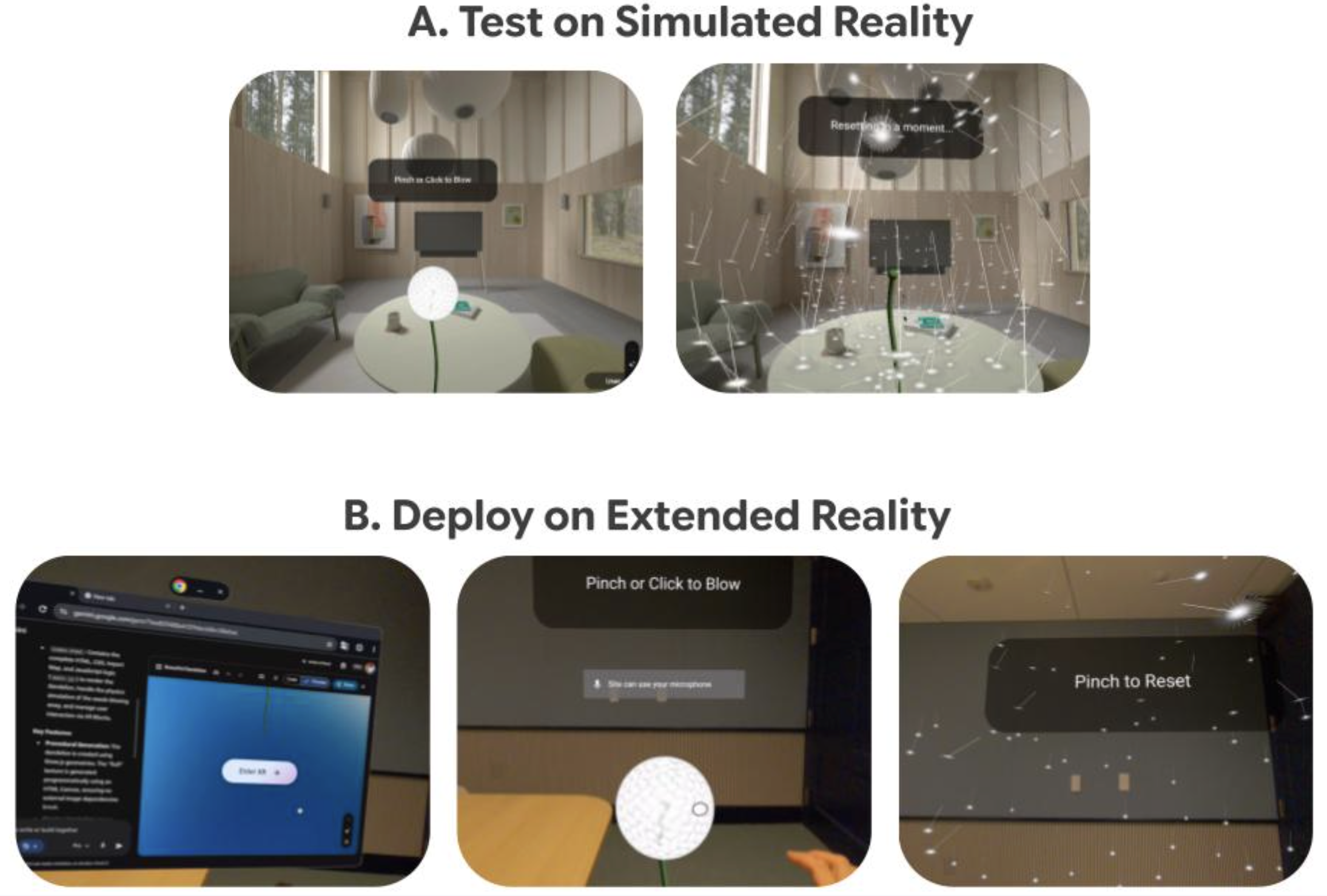
Vibe Coding XR: Accelerating AI + XR prototyping with XR Blocks and Gemini- Human-Computer Interaction and Visualization ·
- Machine Intelligence
-
March 24, 2026
TurboQuant: Redefining AI efficiency with extreme compression- Algorithms & Theory ·
- Generative AI ·
- Machine Intelligence
×
❮
❯