Impossible? Let’s see.
Whether we're shaping the future of sustainability, or optimizing algorithms, or even exploring epidemiological studies, Google Research strives to continuously progress science, advance society, and improve the lives of billions of people.

Impossible? Let’s see.
Advancing the state of the art
Our teams advance the state of the art through research, systems engineering, and collaboration across Google. We publish hundreds of research papers each year across a wide range of domains, sharing our latest developments in order to collaboratively progress computing and science.
Learn more about our philosophy.
Read the latest

MAR 20 · BLOG
Using AI to expand global access to reliable flood forecasts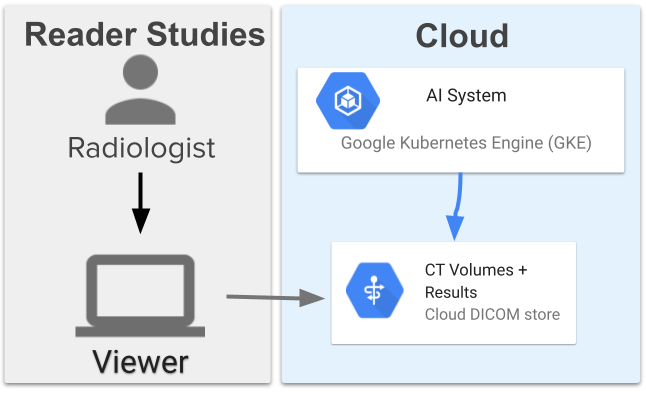
MAR 20 · BLOG
Computer-aided diagnosis for lung cancer screening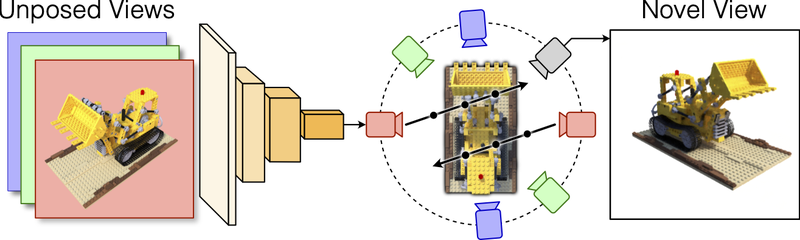
MAR 18 · BLOG
MELON: Reconstructing 3D objects from images with unknown poses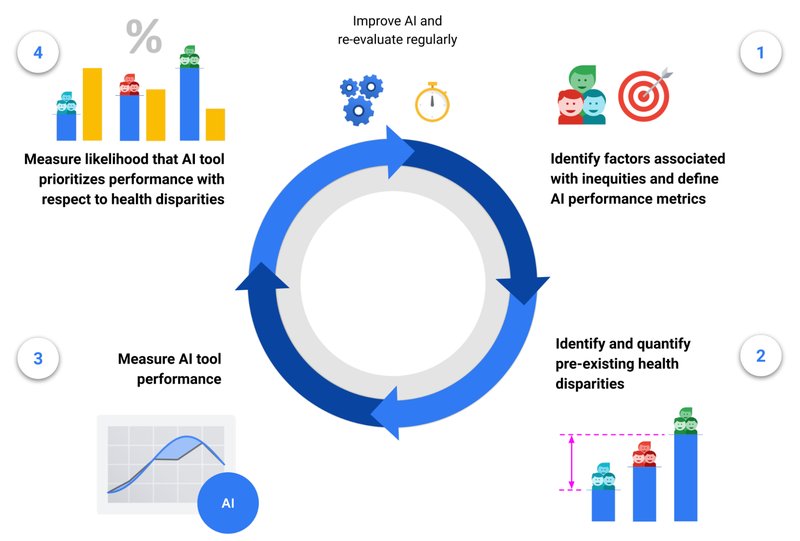
MAR 15 · BLOG
HEAL: A framework for health equity assessment of machine learning performance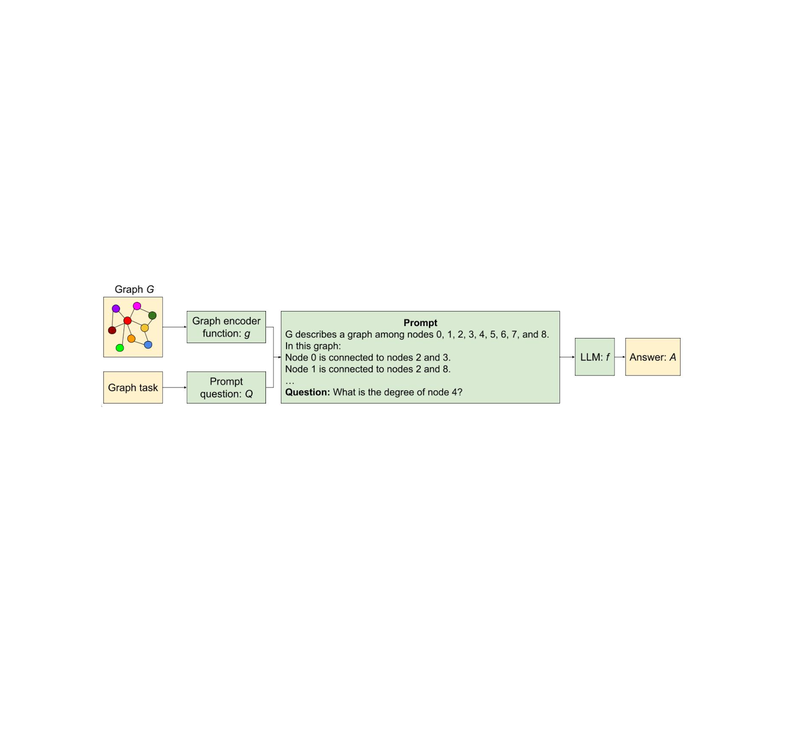
MAR 12 · BLOG
Talk like a graph: Encoding graphs for large language models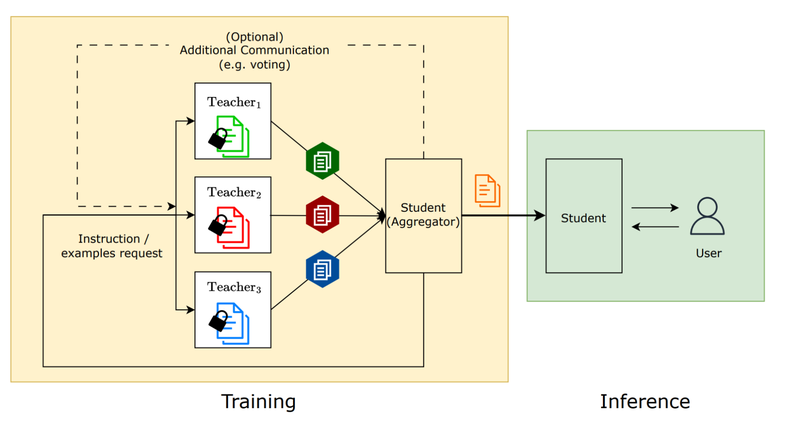
MAR 07 · BLOG
Social learning: Collaborative learning with large language modelsOur research drives real-world change
Med-PaLM 2
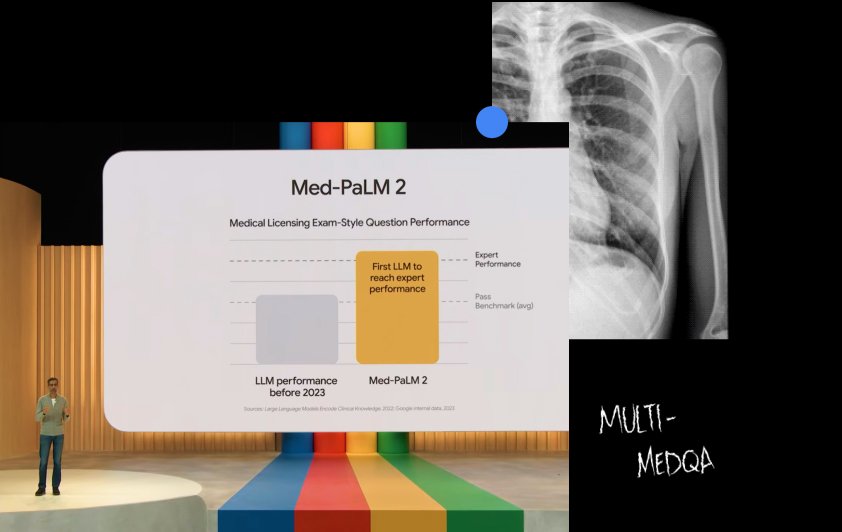
Improving our LLM designed for the medical domain
See the project Explore the research behind the projectProject Contrails
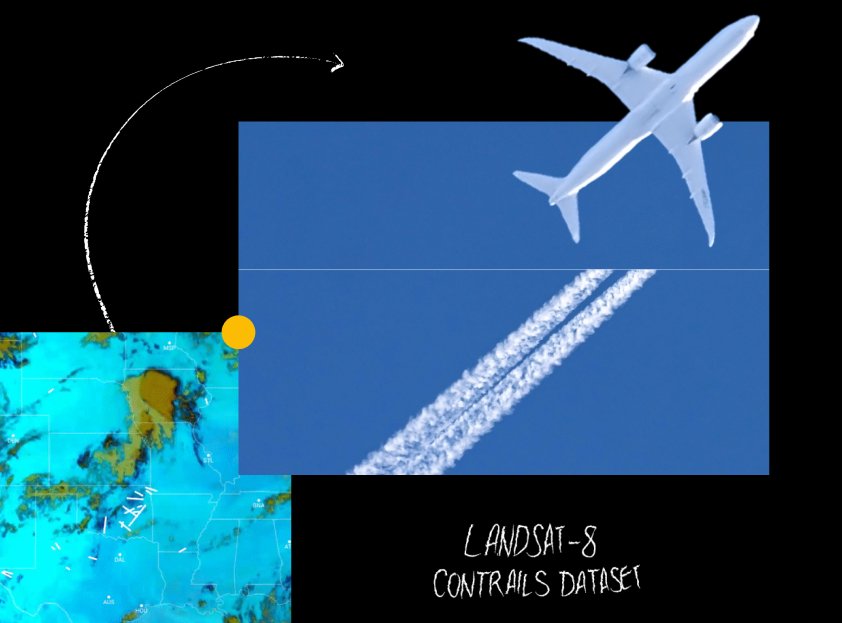
A cost-effective and scalable way AI is helping to mitigate aviation’s climate impact
See the project Explore the research behind the projectSee our impact across other projects


One research paper started it all
The research we do today becomes the Google of the future. Google itself began with a research paper, published in 1998, and was the foundation of Google Search. Our ongoing research over the past 25 years has transformed not only the company, but how people are able to interact with the world and its information.
See the original publication
Responsible research is at the heart of what we do
The impact we create from our research has the potential to reach billions of people. That's why everything we do is guided by methodology that is grounded in responsible practices and thorough consideration.
See how we're advancing AI

